本文出自:【InTheWorld的博客】 (欢迎留言、交流)
LQR (linear quadratic regulator)即线性二次型调节器,这是一个非常常见的控制学科名词。以前学习《现代控制理论》的时候就有接触了,但由于最优控制这部分东西没有作为重点,所以没太掌握。但是自己心里知道《最优控制》是非常重要的,前面看强化学习Model Base部分的时候也同时买了本胡寿松版的《最优控制》。
从个人的学习过程来看,LQR还是挺多种情况的。不少人(甚至是一些书籍的作者)都没把LQR的各种情况搞清楚。首先,LQR有离散形式和连续形式。一般来说教科书上讲连续形式的较多,学过现代控制理论的同学大概都会觉得连续系统的证明和推导都更有理论美感,而离散形式则往往需要一些近似或者假设。而且连续系统在Matlab中也很好仿真。但在实际的工程中,基本都是使用离散形式,谁让现在是数字计算机的时代呢?
LQR的基本理论
LQR的另外一个维度是有限时间和无限时间。对于连续系统而言,有限时间和无限时间的主要区别就是黎卡提方程形式有所不同。对于离散系统而言,求解的推导方式上就会有一些变化。很多书籍或者资料都会讲到离散系统的后向推导方法。这种解法本质上属于基于动态规划(Dynamic Programming)的求解。
对于有些控制指标来说,其控制时间应该被认为是无限的。比如大家经常看到的倒立摆稳定问题,对于该系统来说保持摆不掉下来是一个长期指标。对于这种情况,就不应该使用动态规划的方式了,而是应该使用离散形式的无限时间算法。这里我不准备介绍离散系统的动态规划求解了,因为汽车横向动力学属于一个无限时间的控制问题。所以直接开始从连续系统说起LQR。
无限时间的连续LQR和离散LQR算法
首先,一个连续线性系统可以表示为:
而把二次型的损失函数定义为:
可以证明,存在以下的控制律使得损失函数最小:
其中,K表示为:
而P矩阵是根据连续时间的代数Riccati方程求得的,其中Riccati方程如下:
具体的证明过程,这里就先略过了,最优化控制的书都会有。
至此,我们已经得到了连续系统的LQR的控制律,那么离散系统的LQR控制率呢?首先还是写出离散系统的系统方程:
同时定义控制损失函数为:
同样,也存在如下控制律使得控制损失函数最小
其中,F是通过以下方程计算出来的:
其中,离散代数Riccati方程如下:
前面的公式贴了一大堆,但是实际使用LQR中,其重点还是建模和参数。因为LQR的理论其实是非常成熟的,只要把模型参数传递进去,就可以计算出最优控制律。以动力学问题为例,其实建模主要体现在各种力学平衡方程的建立、状态变量的定义、损失函数中参数的选择(比如Q,R,N这些矩阵中参数的选择)。
建模完成之后其实还有一个离散化的步骤,因为根据数学物理建立的模型一般都是连续的,但是我们需要把控制律实施到数字系统中。其实说来也简单,其实就是把状态方程和观测方程离散化。首先说状态方程,其连续形式为\dot x(t) = Ax(t) + Bu(t) ;
状态方程的左右两边同时乘以e_{}^{-Ax},可以得到:
把右边第一项移动到等式左边,可以得到:
上式两侧同时积分,可以得到
我们假设输入u在每一个时间步长内,都是不变的。定义T为时间步长、x[k]为x(kT),则有如下变换:
\int_{kT}^{(k+1)T}e_{}^{A(kT+T-\tau)}Bu(\tau)d\tau
\int_{kT}^{(k+1)T}e_{}^{A(kT+T-\tau)}Bu(\tau)d\tau
使用换元积分法,并记u(\tau)=u[k],(基于之前的时间步长内,输入不变的假设)。可以得到:
e_{}^{AT}有几个常用的近似公式,比如:
或者
至此,离散化的相关工作就已经完成了。
汽车的横向动力学建模
首先还是从汽车动力学出发吧!首先贴一张汽车横向动力学的示意图:

首先,根据汽车的横向力平衡,可以得到如下方程:
然后根据周向的转矩平衡,可以得到以下的方程:
上述两个公式中,各个符号的含义分别是:
F_{yf}^{}表示前轮在y方向受到的力
F_{yr}^{}表示后轮在y方向受到的力
l_{f}^{}和l_{r}^{}则分别指前向轮受力y向分力和后向轮受力y向分力的力臂
接下来根据转角几何来分析动力学,首先还是贴一张转角的示意图:

首先要引入一个slip angle的概念,这个slip angle的含义就是车轮速度和车轮方向的夹角。前轮和后轮的slip angle分别记为下面的形式。
而且存在以下的等式:
其中,C_{\alpha f}^{}和C_{\alpha r}^{}分别是前轮和后轮的侧偏刚度。这里容易有个疑问,为什么slip angle和侧向力是成正比的呢?其实可以简单分析一下,车轮和地面的作用力表现为摩擦力,而摩擦力的方向是和相对运动方向相反的。车轮所承受的侧向力其实就是摩擦力在轮子轴向的投影,而这个投影的大小是正比于slip angle的正弦值。在角度不大的情况下,就可以认为侧向力是正比于slip angle的。
此外再根据运动的几何关系,可以得到如下的近似公式:
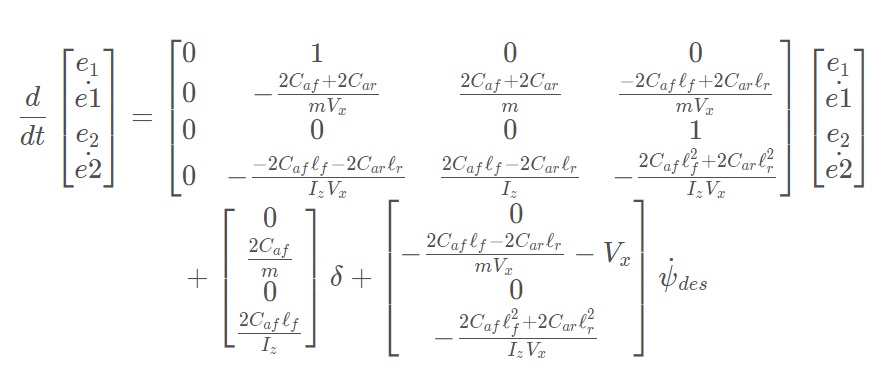
以上这些公式联立,可以得到汽车横向动力学模型如下(其实还差几个公式,这里先不写了):
自动驾驶汽车的横向控制——基于Apollo的实现
apollo的横向控制代码主要实现在apollo/modules/control/controller/lat_controller.cc。
控制器初始化的代码在init函数里面:
Status LatController::Init(const ControlConf *control_conf) {
if (!LoadControlConf(control_conf)) {
AERROR << "failed to load control conf";
return Status(ErrorCode::CONTROL_COMPUTE_ERROR,
"failed to load control_conf");
}
// Matrix init operations.
const int matrix_size = basic_state_size_ + preview_window_;
matrix_a_ = Matrix::Zero(basic_state_size_, basic_state_size_);
matrix_ad_ = Matrix::Zero(basic_state_size_, basic_state_size_);
matrix_adc_ = Matrix::Zero(matrix_size, matrix_size);
matrix_a_(0, 1) = 1.0;
matrix_a_(1, 2) = (cf_ + cr_) / mass_;
matrix_a_(2, 3) = 1.0;
matrix_a_(3, 2) = (lf_ * cf_ - lr_ * cr_) / iz_;
matrix_a_coeff_ = Matrix::Zero(matrix_size, matrix_size);
matrix_a_coeff_(1, 1) = -(cf_ + cr_) / mass_;
matrix_a_coeff_(1, 3) = (lr_ * cr_ - lf_ * cf_) / mass_;
matrix_a_coeff_(2, 3) = 1.0;
matrix_a_coeff_(3, 1) = (lr_ * cr_ - lf_ * cf_) / iz_;
matrix_a_coeff_(3, 3) = -1.0 * (lf_ * lf_ * cf_ + lr_ * lr_ * cr_) / iz_;
matrix_b_ = Matrix::Zero(basic_state_size_, 1);
matrix_bd_ = Matrix::Zero(basic_state_size_, 1);
matrix_bdc_ = Matrix::Zero(matrix_size, 1);
matrix_b_(1, 0) = cf_ / mass_;
matrix_b_(3, 0) = lf_ * cf_ / iz_;
matrix_bd_ = matrix_b_ * ts_;
matrix_state_ = Matrix::Zero(matrix_size, 1);
matrix_k_ = Matrix::Zero(1, matrix_size);
matrix_r_ = Matrix::Identity(1, 1);
matrix_q_ = Matrix::Zero(matrix_size, matrix_size);
int q_param_size = control_conf->lat_controller_conf().matrix_q_size();
if (matrix_size != q_param_size) {
const auto error_msg =
StrCat("lateral controller error: matrix_q size: ", q_param_size,
" in parameter file not equal to matrix_size: ", matrix_size);
AERROR << error_msg;
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, error_msg);
}
for (int i = 0; i < q_param_size; ++i) {
matrix_q_(i, i) = control_conf->lat_controller_conf().matrix_q(i);
}
matrix_q_updated_ = matrix_q_;
InitializeFilters(control_conf);
auto &lat_controller_conf = control_conf->lat_controller_conf();
LoadLatGainScheduler(lat_controller_conf);
LogInitParameters();
return Status::OK();
}
代码中的matrix_a_对应的就是状态矩阵A,matrix_a_coeff_是用来辅助更新matrix_a_的。而matrix_ad_就是离散模型的状态矩阵。对于控制矩阵B来说,命名规则也是类似的。matrix_adc_和matrix_bdc_就先忽略吧,默认配置下它们是等同于matrix_ad和matrix_bd_的。
在控制过程中,其实是有一个定时器不断调用控制器,让控制器计算出控制量,然后再发送给执行器,比如CAN总线上的执行单元。完成这个功能的函数就是如下这个函数:
Status LatController::ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis,
const planning::ADCTrajectory *planning_published_trajectory,
ControlCommand *cmd) {
// Update state = [Lateral Error, Lateral Error Rate, Heading Error, Heading
// Error Rate, preview lateral error1 , preview lateral error2, ...]
UpdateState(debug);
UpdateMatrix();
// Compound discrete matrix with road preview model
UpdateMatrixCompound();
// Add gain scheduler for higher speed steering
if (FLAGS_enable_gain_scheduler) {
matrix_q_updated_(0, 0) =
matrix_q_(0, 0) *
lat_err_interpolation_->Interpolate(
VehicleStateProvider::instance()->linear_velocity());
matrix_q_updated_(2, 2) =
matrix_q_(2, 2) *
heading_err_interpolation_->Interpolate(
VehicleStateProvider::instance()->linear_velocity());
common::math::SolveLQRProblem(matrix_adc_, matrix_bdc_, matrix_q_updated_,
matrix_r_, lqr_eps_, lqr_max_iteration_,
&matrix_k_);
} else {
common::math::SolveLQRProblem(matrix_adc_, matrix_bdc_, matrix_q_,
matrix_r_, lqr_eps_, lqr_max_iteration_,
&matrix_k_);
}
// feedback = - K * state
// Convert vehicle steer angle from rad to degree and then to steer degree
// then to 100% ratio
const double steer_angle_feedback = -(matrix_k_ * matrix_state_)(0, 0) * 180 /
M_PI * steer_ratio_ /
steer_single_direction_max_degree_ * 100;
const double steer_angle_feedforward = ComputeFeedForward(debug->curvature());
// Clamp the steer angle to -100.0 to 100.0
double steer_angle = common::math::Clamp(
steer_angle_feedback + steer_angle_feedforward, -100.0, 100.0);
if (VehicleStateProvider::instance()->linear_velocity() <
FLAGS_lock_steer_speed &&
VehicleStateProvider::instance()->gear() == canbus::Chassis::GEAR_DRIVE &&
chassis->driving_mode() == canbus::Chassis::COMPLETE_AUTO_DRIVE) {
steer_angle = pre_steer_angle_;
}
pre_steer_angle_ = steer_angle;
cmd->set_steering_target(steer_angle);
cmd->set_steering_rate(FLAGS_steer_angle_rate);
return Status::OK();
}
代码被我精简了不少,可以很清晰地看到程序的脉络,首先算出观测值,然后更新动力学模型中各个个矩阵的参数,然后计算前向控制和反馈控制,最后把方向盘转角传递给控制命令cmd。这个流程大致就是这样,接下来我们看看矩阵更新的代码,体验一下LQR的离散化过程。其实就是updateMatrix函数了。
void LatController::UpdateMatrix() {
const double v = std::max(VehicleStateProvider::instance()->linear_velocity(),
minimum_speed_protection_);
matrix_a_(1, 1) = matrix_a_coeff_(1, 1) / v;
matrix_a_(1, 3) = matrix_a_coeff_(1, 3) / v;
matrix_a_(3, 1) = matrix_a_coeff_(3, 1) / v;
matrix_a_(3, 3) = matrix_a_coeff_(3, 3) / v;
Matrix matrix_i = Matrix::Identity(matrix_a_.cols(), matrix_a_.cols());
matrix_ad_ = (matrix_i - ts_ * 0.5 * matrix_a_).inverse() *
(matrix_i + ts_ * 0.5 * matrix_a_);
}
是不是感觉matrix_ad_的计算代码很眼熟,其实就是本文第一部分提到的近似计算公式。至此,LQR的理论与实践都算是分析了一遍~~~
参考文献:
【1】https://github.com/ApolloAuto/apollo
【2】Rajamani R. Vehicle Dynamics and Control[M] Second Edition
【3】https://en.wikipedia.org/wiki/Linear-quadratic_regulator
【4】https://en.wikipedia.org/wiki/Discretization#Approximations
不错,研究生的汽车系统动力学课上我们是拿LQR做垂向控制来做案例的。
嗯,我本来很喜欢控制理论的,可惜事与愿违,由不得我。
你好 感觉这篇文章对我现在做的很有帮助。可惜文中的图片无法打开,请问哪里有完整版本阅读?谢谢
不好意思哈!这个图片是因为迁移主机导致的,我现在把链接重新编辑了下。这里就是唯一版本了
Hi 万分感谢 已经可以看到图了。有一个问题请教:就是F_yf是前轮在y方向受的力,根据图示,y方向是和车身垂直的方向,而不是车轮的轴向,所以这里说车轮所承受的侧向力就是摩擦力在轮子轴向的投影,是为什么?侧向力是y方向的F_yf吗?这个应该不是车轮的轴向吧?谢谢。
排版也拾掇了下。
主要是我比较懒,如果有人提出问题的话,我还是会改的。
还有一个问题:最后横向动力学模型公式里A矩阵的第四排第二个元素分子应该是正的2*C_af*l_f
@张群,问题一:确实是车身的垂直方向,而不是车轮的轴向。你可以想一下,车的前后轮偏角都不一样,没参照转矩也不好算的。
问题二:我有时间看下哈,得推推公式,或者你直接看参考文献2,我也是看这本书的。
谢谢回复。我就是看的这本书,然后对照比对的,确实比书上多了一个负号。哈哈。